Nama
:
1. Rahmandino
Damar Maulana (153600065)
2. Achmad
Faudzi (153600067)
Halo
kawan semua... tridak terasa sudah memasuki minggu ke 5. Dipostingan kali ini
kita akan memprogram arduino untuk mengendalikan motor servo. Sekedar informasi
Motor servo adalah sebuah motor DC dengan sistem umpan balik tertutup di mana
posisi rotor-nya akan diinformasikan kembali ke rangkaian kontrol yang ada di
dalam motor servo. Motor ini terdiri dari sebuah motor DC, serangkaian gear,
potensiometer, dan rangkaian kontrol. Umumnya motor servo ini digunakan untuk
membuat rangkaian robotika sederhana.
Baiklah
daripada terlalu banyak basa basi langsung saja kalian siapkan bahan-bahan
sebagai berikut.
No
|
Bahan
|
Jumlah
|
Keterangan
|
1
|
Arduino
Uno + Kabel USB
|
1
|
|
2
|
Motor
servo
|
2
|
Gerakan 180º
|
3
|
Project
Board
|
1
|
|
4
|
Laptop/Notebook/PC
|
1
|
Sudah terinstal Software Arduino
|
5
|
Kabel
connector
|
secukupnya
|
Jika
alat dan bahan sudah disiapkan langsung saja kita mulai beberapa percobaan
berikut.
1. Percobaan
pertama
Tujuan : program mengendalikan gerakan motor servo
Untuk percobaan pertama ini kita cukup menggerakkan 2 motor servo secara
bersamaan. Langkah-langkah percobaannya.
a. Rangkai
bahan yang telah kita siapkan diatas sesuai skema
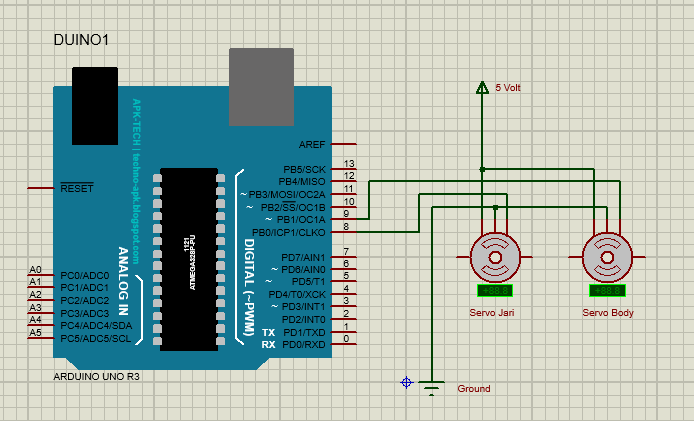
Ket
:
Coklat
: Ground
Merah
: 5 V
Orange : Pin Input Arduino
b. Nyalakan
PC/Laptop kemudian buka software Arduino uno
c. Sambungkan
kabel USB Arduino ke Port USB PC/Laptop (Pastikan Driver arduno sudah
terinstal dan samakan port “COM” software dengan cara Klik “Tools” à Port
à Pilih
COM dimana arduino tersambung)
d. Masukkan
program berikut di Software Arduino
#include <Servo.h>
Servo myservobody,myservojari;
int pos = 0;
int pos1 = 0;
void setup() {
myservobody.attach(8);
myservojari.attach(9);
}
void loop() {
for (pos = 0, pos1 <=
180; pos <= 90, pos1 >= 90; pos += 1, pos1 -= 1) {
myservobody.write(pos);
myservojari.write(pos1);
delay(15);
}
for (pos = 90, pos1 >=
90; pos >= 0, pos1 <= 180; pos -= 1, pos1 += 1) {
myservobody.write(pos);
myservojari.write(pos1);
delay(15);
}
}
ATAU
#include <Servo.h>
Servo myservobody,myservojari;
int pos = 0;
void setup() {
myservobody.attach(8);
myservojari.attach(9);
}
void loop() {
for (pos = 0; pos <= 90;
pos += 1 ) {
myservobody.write(pos);
myservojari.write(90-pos);
delay(15);
}
for (pos = 90; pos >= 0;
pos -= 1) {
myservobody.write(pos);
myservojari.write(90-pos);
delay(15);
}
}
e. Jika
hasil percobaan kawan-kawan benar, maka kerja motor servo akan sesuai video
berikut.
2. Percobaan
kedua
Tujuan : Mengendalikan gerakan motor servo dengan Sub Program
Sama seperti percobaan pertama, untuk percobaan ini kita menggerak 2
motor servo secara bersamaan. Bedanya kita menggunakan sub program untuk
memudahkan mengatur gerakan motor. Cara ini umum digunakan untuk robotika
sederhana. Langkah-langkah percobaannya.
a. Rangkai
bahan yang telah kita siapkan diatas sesuai skema

Ket
:
Coklat
: Ground
Merah
: 5 V
Orange : Pin Input Arduino
b. Nyalakan
PC/Laptop kemudian buka software Arduino uno
c. Sambungkan
kabel USB Arduino ke Port USB PC/Laptop (Pastikan Driver arduno sudah
terinstal dan samakan port “COM” software dengan cara Klik “Tools” à Port
à Pilih
COM dimana arduino tersambung)
d. Masukkan
program berikut di Software Arduino
#include <Servo.h>
Servo myservobody,myservojari;
int pos = 0;
void setup() {
myservobody.attach(8);
myservojari.attach(9);
}
void body() {
for (pos = 0; pos <= 90;
pos += 1 ) {
myservobody.write(pos);
delay(15);
}
}
void bodybalik (){
for (pos = 90; pos >= 0;
pos -= 1) {
myservobody.write(pos);
delay(15);
}
}
void jari() {
for (pos = 0; pos <= 90;
pos += 1 ) {
myservojari.write(pos);
delay(15);
}
}
void jaribalik (){
for (pos = 90; pos >= 0;
pos -= 1) {
myservojari.write(pos);
delay(15);
}
}
void loop () {
body ();
jari ();
bodybalik ();
jaribalik ();
}
e. Jika
hasil percobaan kawan-kawan benar, maka kerja motor servo akan sesuai video
berikut.
Bagus. Nilai 100
BalasHapus